



Nächste Seite: Integrale der Bewegung und
Aufwärts: Anwendungen der BG
Vorherige Seite: Eindimensionale Probleme
Inhalt
Das Problem von zwei Massenpunkten  ,
,  , die mit einer potentiellen Energie der Form
, die mit einer potentiellen Energie der Form
 wechselwirken, ist von zentraler Bedeutung in der Physik.
Vielleicht ist es deswegen wichtig, weil man es exakt lösen kann, ganz
im Gegensatz zum Mehrkörperproblem. Exakt lösbare Probleme der Physik sind deshalb sehr wichtig,
weil sie "vernünftige'' Ansätze für die Lösung komplizierter Probleme liefern, die physikalisch
relevanter sind, aber nicht exakt lösbar sind.
Deswegen wollen wir dieses Problem ausführlich behandeln.
wechselwirken, ist von zentraler Bedeutung in der Physik.
Vielleicht ist es deswegen wichtig, weil man es exakt lösen kann, ganz
im Gegensatz zum Mehrkörperproblem. Exakt lösbare Probleme der Physik sind deshalb sehr wichtig,
weil sie "vernünftige'' Ansätze für die Lösung komplizierter Probleme liefern, die physikalisch
relevanter sind, aber nicht exakt lösbar sind.
Deswegen wollen wir dieses Problem ausführlich behandeln.
Wir beginnen mit der Lagrange Funktion, die diesem Problem angemessen ist,
nämlich
Die aus dieser Lagrange Funktion resultierenden BG zeigen ein kompliziertes Verhalten: die BG für  und
und  bilden ein gekoppeltes nicht lineares Differentialgleichungssystem, das mathematisch sehr
schwierig zu lösen ist. Wir versuchen durch die lineare Kombination der Vektoren und
die BG zu entkoppeln. Eine geeignete Linearkombination ist
bilden ein gekoppeltes nicht lineares Differentialgleichungssystem, das mathematisch sehr
schwierig zu lösen ist. Wir versuchen durch die lineare Kombination der Vektoren und
die BG zu entkoppeln. Eine geeignete Linearkombination ist
 . Damit ist die
potentielle Energie ein skalares Feld eines einzelnen Vektors . Diese Vereinfachung ist möglich, weil die potentielle
Energie nur von
. Damit ist die
potentielle Energie ein skalares Feld eines einzelnen Vektors . Diese Vereinfachung ist möglich, weil die potentielle
Energie nur von
 abhängt. Durch diese Linearkombination entsteht aber in der kinetischen
Energie ein gemischter Term der Form
abhängt. Durch diese Linearkombination entsteht aber in der kinetischen
Energie ein gemischter Term der Form
 . Diesen gemischten Term wollen wir durch die Einführung einer weiteren
Linearkombination eliminieren. Wir
führen deshalb folgende Transformation in
. Diesen gemischten Term wollen wir durch die Einführung einer weiteren
Linearkombination eliminieren. Wir
führen deshalb folgende Transformation in  ein:
ein:
Mit der Wahl
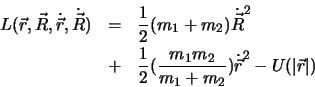
 erreichen wir die transformierte Lagrange Funktion
erreichen wir die transformierte Lagrange Funktion
Der Ortsvektor  bezeichnet den Schwerpunkt (oder Massenmittelpunkt)der Massen , .
bezeichnet den Schwerpunkt (oder Massenmittelpunkt)der Massen , .
 ist der Ortsvektor der Relativbewegung. Der Faktor
ist der Ortsvektor der Relativbewegung. Der Faktor
 ist die reduzierte Masse.
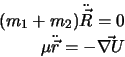
Die Lagrange Gleichungen lauten
ist die reduzierte Masse.
Die Lagrange Gleichungen lauten
In den transformierten Koordinaten, sind die BG für  und
und  entkoppelt.
Die BG für hat die Lösung
entkoppelt.
Die BG für hat die Lösung
 , d.h. der
Schwerpunkt bewegt sich auf einer Gerade mit konstanter Geschwindigkeit und beeinflusst die Relativbewegung nicht.
Dies ist ein Beispiel für das Prinzip, das in der Physik als das Galilei'sche
Relativitätsprinzip bekannt ist: Die physikalischen Beobachtungen innerhalb eines Systems
sind unabhängig davon, ob das System ruht oder sich mit konstanter Geschwindigkeit bewegt.
Beschreibt die Erde eine elliptische Bahn um die Sonne, so tut sie das, egal ob die Sonne
fest am Himmel steht oder sich monoton bewegt.
Die Relativbewegung ist zur dreidimensionalen Bewegung eines Einteilchensystems mit Masse
, d.h. der
Schwerpunkt bewegt sich auf einer Gerade mit konstanter Geschwindigkeit und beeinflusst die Relativbewegung nicht.
Dies ist ein Beispiel für das Prinzip, das in der Physik als das Galilei'sche
Relativitätsprinzip bekannt ist: Die physikalischen Beobachtungen innerhalb eines Systems
sind unabhängig davon, ob das System ruht oder sich mit konstanter Geschwindigkeit bewegt.
Beschreibt die Erde eine elliptische Bahn um die Sonne, so tut sie das, egal ob die Sonne
fest am Himmel steht oder sich monoton bewegt.
Die Relativbewegung ist zur dreidimensionalen Bewegung eines Einteilchensystems mit Masse  geworden, das in einem Kraftfeld
geworden, das in einem Kraftfeld
 eingebettet ist.
eingebettet ist.
Wir wollen jetzt zeigen, dass die Relativbewegung auf einer Ebene erfolgt, d.h., dass es sich um eine zweidimensionale Bewegung handelt.
Wir betrachten die BG
 , und multiplizieren vektoriell beide Seiten mit .
Da
, und multiplizieren vektoriell beide Seiten mit .
Da
 ist, ist
ist, ist
 parallel zu : die rechte Seite der BG wird
parallel zu : die rechte Seite der BG wird  . Das ist
offensichtlich eine Folge davon, dass die potentielle Energie nur vom Betrag von abhängt und dass das
resultierende Kraftfeld zentralsymmetrisch ist. Die linke Seite lässt sich als
. Das ist
offensichtlich eine Folge davon, dass die potentielle Energie nur vom Betrag von abhängt und dass das
resultierende Kraftfeld zentralsymmetrisch ist. Die linke Seite lässt sich als
![$\frac{d[\vec{r}x \mu \dot{\vec r}]}{dt}$](img386.png) schreiben. Daraus ergibt sich die Gleichung
schreiben. Daraus ergibt sich die Gleichung
Diese Gleichung besagt, dass der Vektor  ein Integral der Bewegung ist: der Drehimpuls. zeigt während der ganzen Bewegung
in eine feste Richtung. Da als Vektorprodukt von und
ein Integral der Bewegung ist: der Drehimpuls. zeigt während der ganzen Bewegung
in eine feste Richtung. Da als Vektorprodukt von und  konstruiert
wurde, steht er senkrecht zu diesen beiden Vektoren. Die Bahn eines Teilchens in einem zentralsymmetrischen
Kraftfeld liegt also vollständig in einer Ebene, die auf senkrecht steht.
Die für die Relativbewegung massgebende Lagrange Funktion kann man in Polarkoordinaten innerhalb der
konstruiert
wurde, steht er senkrecht zu diesen beiden Vektoren. Die Bahn eines Teilchens in einem zentralsymmetrischen
Kraftfeld liegt also vollständig in einer Ebene, die auf senkrecht steht.
Die für die Relativbewegung massgebende Lagrange Funktion kann man in Polarkoordinaten innerhalb der  Ebene schreiben:
Ebene schreiben:
Die dazugehörigen BG sind
Eine naive Anwendung der Newton'schen Gleichungen hätte zu den (falschen) BG
 und
und
 geführt.
Der Übergang zu Polarkoordinaten für die Beschreibung der Bahn hat
zu zusätzlichen effektiven Kräften geführt (neben der
ursprnglichen, zentral gerichteten Kraft):
geführt.
Der Übergang zu Polarkoordinaten für die Beschreibung der Bahn hat
zu zusätzlichen effektiven Kräften geführt (neben der
ursprnglichen, zentral gerichteten Kraft):
- Die zusätzliche radial gerichtete Kraft heisst Zentrifugalkraft. Sie beeinflusst
die radiale Bewegung.
- Die für die Änderung der Drehgeschwindigkeit verantworliche Kraft heisst
Coriolis-Kraft.
Wenn man wissen will, wie sich Abstand und Drehwinkel ändern, muss man die
Gravitationskraft sowie die Zentrifugal- und Coriolis-Kraft berücksichtigen.
Wir wollen jetzt die BG integrieren.
 lässt sich auch schreiben als
lässt sich auch schreiben als
mit der Lösung
 .
Diese Lösung hat eine eine einfache geometrische Deutung. Der Ausdruck
.
Diese Lösung hat eine eine einfache geometrische Deutung. Der Ausdruck
 stellt die Fläche
des Sektors dar, der von zwei unendlich dicht benachbarten Radiusvektoren und dem dazwischenliegenden
Bahnelement gebildet wird.
Wir bezeichnen diese Fläche mit
stellt die Fläche
des Sektors dar, der von zwei unendlich dicht benachbarten Radiusvektoren und dem dazwischenliegenden
Bahnelement gebildet wird.
Wir bezeichnen diese Fläche mit  und schreiben den Drehimpuls der Masse als
und schreiben den Drehimpuls der Masse als  . Die Ableitung
von
. Die Ableitung
von  - die Flächengeschwindigkeit ist eine Konstante: In gleichen Zeitintervallen überstreicht
der Ortsvektor die gleiche Fläche
(Flächensatz, 2. Satz von Kepler).
Einsetzen von
- die Flächengeschwindigkeit ist eine Konstante: In gleichen Zeitintervallen überstreicht
der Ortsvektor die gleiche Fläche
(Flächensatz, 2. Satz von Kepler).
Einsetzen von
 in der radialen BG ergibt
in der radialen BG ergibt
d.h. die radiale Bewegung entwickelt sich
als würde sich die Masse  in einem effektiven radialen Kraftfeld befinden. Dieses Kraftfeld besteht aus der
Zentrifugalkraft und der Gravitationskraft und lässt sich schreiben als die radiale Ableitung einer effektiven
potentiellen Energie, die sich aus der Summe der Zentrigfugalenergie und der potentiellen Energie der Gravitation zusammensetzt.
Formell ist die radiale Bewegung zu einem eindimensionalen Problem reduziert worden.
in einem effektiven radialen Kraftfeld befinden. Dieses Kraftfeld besteht aus der
Zentrifugalkraft und der Gravitationskraft und lässt sich schreiben als die radiale Ableitung einer effektiven
potentiellen Energie, die sich aus der Summe der Zentrigfugalenergie und der potentiellen Energie der Gravitation zusammensetzt.
Formell ist die radiale Bewegung zu einem eindimensionalen Problem reduziert worden.
Abbildung 2.4:
 als Funktion von
als Funktion von 
|
|
Daraus folgt
d.h. die D.G.
Abbildung 2.5:
Zur definition der Wendepunkte
|
|
Von besonderer Bedeutung sind solche Werte , für welche
 gilt.
An diesen Punkten ist die radiale Geschwindigkeit genau 0. Das bedeutet nicht, dass die Masse
anhält, da die Drehgeschwindigkeit, gegeben durch
gilt.
An diesen Punkten ist die radiale Geschwindigkeit genau 0. Das bedeutet nicht, dass die Masse
anhält, da die Drehgeschwindigkeit, gegeben durch  , endlich bleibt. Diese Punkte sind
Wendepunkte der Bahn, wo aufhört zu wachsen und beginnt kleiner zu werden.
Man kann, je nach Wert von
, endlich bleibt. Diese Punkte sind
Wendepunkte der Bahn, wo aufhört zu wachsen und beginnt kleiner zu werden.
Man kann, je nach Wert von  , mindestens zwei Klassen von Bahnen unterscheiden. Wenn
, mindestens zwei Klassen von Bahnen unterscheiden. Wenn  ist, dann existiert
nur eine Lösung der Gleichung.
ist, dann existiert
nur eine Lösung der Gleichung.  ist dann ein minimaler
Radius, den die Bahn annehmen kann. Es existiert kein maximaler Radius - die Masse kommt aus
weiter Entfernung, kehrt bei um und verschwindet wieder ins Nichts: die Bewegung des
Teilchens ist infinit. Diesen Bahnen
folgen zum Beispiel die Kometen.
ist dann ein minimaler
Radius, den die Bahn annehmen kann. Es existiert kein maximaler Radius - die Masse kommt aus
weiter Entfernung, kehrt bei um und verschwindet wieder ins Nichts: die Bewegung des
Teilchens ist infinit. Diesen Bahnen
folgen zum Beispiel die Kometen.
Abbildung 2.6:
Mögliche Bahnen im Gravitationsfeld
|
|
Abbildung 2.7:
Rosettenbahn
|
|
Ist  dann existiert ein minimaler
dann existiert ein minimaler  und ein maximaler
und ein maximaler  Radius:
Die Bahn ist finit und verläuft vollständig in einem ringförmigen Gebiet. Das bedeutet aber
nicht, dass die Bahn geschlossen ist (geschlossen bedeutet, dass nach bestimmten Zeiten
die Bahn immer wieder an denselben Ort zurückkehrt). In der Tat werden geschlossene Bahnen
dann und nur dann beobachtet, wenn
Radius:
Die Bahn ist finit und verläuft vollständig in einem ringförmigen Gebiet. Das bedeutet aber
nicht, dass die Bahn geschlossen ist (geschlossen bedeutet, dass nach bestimmten Zeiten
die Bahn immer wieder an denselben Ort zurückkehrt). In der Tat werden geschlossene Bahnen
dann und nur dann beobachtet, wenn  (Kepler Problem!) oder
(Kepler Problem!) oder  ist. Bei
beliebigen -Abhängigkeiten sind geschlossene Bahnen äusserst selten; stattdessen hat man sog.
Rosettenbahnen.
Die Zentrifugalbarriere (
ist. Bei
beliebigen -Abhängigkeiten sind geschlossene Bahnen äusserst selten; stattdessen hat man sog.
Rosettenbahnen.
Die Zentrifugalbarriere ( )sorgt im Allgemeinen dafür, dass die Masse niemals zum Mittelpunkt
des Feldes gelangt, auch dann nicht, wenn das Feld anziehend ist.
Man kann zeigen, dass die geschlossenen Bahnen beim Kepler Problem Ellipsen sind. Dies steht in Einklang mit den Beobachtungen
(1. Satz von Kepler). Die Sonne befindet sich auf einem Fokus der
Ellipse.
)sorgt im Allgemeinen dafür, dass die Masse niemals zum Mittelpunkt
des Feldes gelangt, auch dann nicht, wenn das Feld anziehend ist.
Man kann zeigen, dass die geschlossenen Bahnen beim Kepler Problem Ellipsen sind. Dies steht in Einklang mit den Beobachtungen
(1. Satz von Kepler). Die Sonne befindet sich auf einem Fokus der
Ellipse.
Die nicht geschlossenen Bahnen ( ) sind Hyperbel.
) sind Hyperbel.
Eine spezielle Bahn liegt vor, wenn gleich dem Minimum der effektiven potentiellen Energie ist. Dann ist
 .
Die Bahn ist in diesem Spezialfall ein Kreis,
.
Die Bahn ist in diesem Spezialfall ein Kreis,  . Es gibt keine Corioli Kraft, so dass auch
. Es gibt keine Corioli Kraft, so dass auch
 ist. Die Drehgeschwindigkeit ist dann eine Konstante, nämlich
ist. Die Drehgeschwindigkeit ist dann eine Konstante, nämlich
 . Da die Kreisbahn einem Minimum der radialen potentiellen Energie
entspricht, summieren sich die radialen Kräfte exakt auf Null.
. Da die Kreisbahn einem Minimum der radialen potentiellen Energie
entspricht, summieren sich die radialen Kräfte exakt auf Null.
Nächste Seite: Integrale der Bewegung und
Aufwärts: Anwendungen der BG
Vorherige Seite: Eindimensionale Probleme
Inhalt
Kraeutler Vincent
2000-05-30
![\begin{eqnarray*}
\frac{d[\vec{r}\times \mu \dot{\vec r}]}{dt} = 0\\
(\vec{r} \times \mu \dot{\vec r}) \doteq {\vec L} = Konst.
\end{eqnarray*}](img387.png)
![\begin{eqnarray*}
\frac{d}{dt}[\frac{\partial L}{\partial \dot{\varphi}}] & = & ...
...htarrow\\
m \ddot{r} & = & m r \dot{\varphi}^2 - \frac{dU}{dr}
\end{eqnarray*}](img392.png)
![\includegraphics [width=6cm]{f24.eps}](img399.png)
![\includegraphics [width=6cm]{f25.eps}](img404.png)
![\includegraphics [width=6cm]{f26.eps}](img407.png)
![\includegraphics [width=5cm]{f27l.eps}](img412.png)
![\includegraphics [width=5cm]{f27r.eps}](img413.png)
![\includegraphics [width=6cm]{f28.eps}](img414.png)